
- Шта је претварање фреквенције
- Избор мотора
- Добијање магнетног поља
- Индустријски фреквентни погони
- Предности употребе фреквентних претварача
- Регулација вектора и фреквенција
- Техничка имплементација претварача
- Принцип регулације брзине
 Често, многи шунке или само пословни људи морају да контролишу брзину трофазног мотора. За то нема смисла користити банални регулатор снаге, јер је изграђен на принципу промене напона, а ипак, као што знате, АЦ мотори не желе да се регулишу на овај начин, чак ни једнофазни.
Често, многи шунке или само пословни људи морају да контролишу брзину трофазног мотора. За то нема смисла користити банални регулатор снаге, јер је изграђен на принципу промене напона, а ипак, као што знате, АЦ мотори не желе да се регулишу на овај начин, чак ни једнофазни.
Обрти ће се, наравно, променити, али само у малој и скоро неприметној граници, након које, кад се достигне доњи праг и када се 220 В напаја на 150 В, обртаји се потпуно заустављају. Ако осовина такође треба да прими нормалан тренутак, на пример, када регулише брзину транспортера или летве, у зависности од тога на шта је повезана, тада је погодан само фреквентни претварач.
Шта је претварање фреквенције
 Под појмом претварање фреквенције, а затим претварачем фреквенције, требали бисмо разумјети цијели систем који нешто ради. Наиме, претвара фреквенцију доводног намота асинхроног напонског мотора. То јест, усмеравамо вашу пажњу на чињеницу да се овде не мења напон, већ његова фреквенција. У овом начину управљања одржава се тренутак на вратилу мотора када се промијени брзина вртње.
Под појмом претварање фреквенције, а затим претварачем фреквенције, требали бисмо разумјети цијели систем који нешто ради. Наиме, претвара фреквенцију доводног намота асинхроног напонског мотора. То јест, усмеравамо вашу пажњу на чињеницу да се овде не мења напон, већ његова фреквенција. У овом начину управљања одржава се тренутак на вратилу мотора када се промијени брзина вртње.
Али да бисте направили фреквенцијски претварач властитим рукама, морате запамтити дизајн и могуће карактеристике рада асинхроних мотора. Штавише, одлучујући се посебно за производњу таквог уређаја, први корак је проналажење мотора који ће одговарати параметрима, који ће се носити са радом који му је додељен као део готовог комплекса.
Избор мотора
Да бисте дизајнирали домаћи цхастотник, прво се морате сетити шта је асинхрони мотор и како функционише. Не-синхрони мотор или ДПТ је механички уређај који се састоји од статора са пољским намотима и ротора. Друга компонента може бити:
 кратки спој, то јест, средњи проводници су на крајевима спојени прстеновима, а они су сами дебели и кратки, због чега се дизајн назива "коло веверице";
кратки спој, то јест, средњи проводници су на крајевима спојени прстеновима, а они су сами дебели и кратки, због чега се дизајн назива "коло веверице";- фаза, ротор има неколико намотаја који су повезани на клизне прстенове који се користе за уклањање напона у режиму рада генератора.
Принцип рада мотора је врло једноставан и састоји се од утицаја ротирајућег магнетног поља створеног у статору на ротор кавез веверице у коме се појављује емф. Због тога у ротору почиње да тече струја, што доводи до формирања сила које међусобно делују са магнетним пољем статора. У овом случају су брзина ротора и магнетно поље неједнаки, због чега је назив асинхрони мотор.
Разумно је претпоставити да ако промените фреквенцију напона који напаја статор, брзина ротора ће се променити. У ствари, стога све озбиљне компаније користе управо фреквентне претвараче за контролу таквих мотора. Када властитим рукама дизајнирате склоп фреквентног претварача за електрични мотор, требали бисте узети у обзир врсту мотора и све његове карактеристике. Конкретно, снага, број полова и максимална брзина ротације. Готове шеме можете преузети са интернетског часописа "Радиоцот" . Има их пуно .
Добијање магнетног поља
 Да би се добило трофазно ротирајуће магнетно поље, потребно је провести струју кроз завојницу на статору потребном фреквенцијом, која ће бити одређена формулом: иА = И м синωт. Као резултат деловања ове струје, МДС ФА почиње да делује дуж осе скретања. Пошто се завоји у статору наизменично мењају, пукотина ће имати исти карактер, стварајући заједничку пулсирајућу силу Ф, која је константа. Дефинише се као корен квадратних сила у два завоја померена један у односу на други под углом од 90 °.
Да би се добило трофазно ротирајуће магнетно поље, потребно је провести струју кроз завојницу на статору потребном фреквенцијом, која ће бити одређена формулом: иА = И м синωт. Као резултат деловања ове струје, МДС ФА почиње да делује дуж осе скретања. Пошто се завоји у статору наизменично мењају, пукотина ће имати исти карактер, стварајући заједничку пулсирајућу силу Ф, која је константа. Дефинише се као корен квадратних сила у два завоја померена један у односу на други под углом од 90 °.
Као резултат, настаје ротација поља угластим брзинама, изражена формулом за сваки заокрет засебно: ω = 2π ф 1. Али за израчунавање брзине поља у целој машини потребно је узети у обзир укупан број парова полова, изражен симболом п. И тада ће брзина поља бити једнака: ω 0 = 2π ф 1 / п. Сходно томе, могуће је израчунати брзину изражену у рпм: н0 = 60 ф 1 / п.
Поред ових података, мора се имати на уму да ће се карактеристике разликовати од режима рада у празном ходу, то јест, при ω = ω 0 и при оптерећењу, када ω = ω 0. И било би корисно подсетити и да је под оптерећењем таква ствар као што је проклизавање, које се појављује због кашњења ω од ω 0. И изражава се као: с = (ω 0 - ω) / ω 0. Ово сугерише да је при изградњи АЦС-а са повећањем ове вредности потребно аутоматски променити напонску фреквенцију у намотима како би се осигурала стабилност брзине под различитим оптерећењима .
Индустријски фреквентни погони
Сви индустријски цхастотникови пружају различите принципе за контролу брзине и момента на вратилу индукцијских мотора, променом не само фреквенције, већ и фазног помака, времена пораста управљачких импулса, динамичког кочења и многих других параметара. У исто време, све ово се врши аутоматски без додатног учешћа споља. Због тога се индустријски круг претварача фреквенције за трофазни мотор састоји од следећих компоненти:
 Централни процесор, који делује као облик главних и управљачких импулса.
Централни процесор, који делује као облик главних и управљачких импулса.- Напајање: исправљач и истовремено контролна јединица, уграђен у ИГБТ - модуле.
- Јединица за унос и излаз података или само интерфејс за корисничку интеракцију.
- Конвертор сабирница за рад са системом управљања програмом.
Трофазни мотор може бити опремљен сензором, а затим је потребна повратна информација. Сензор може бити оптички, индуктивни или магнетни. Код мотора са високим обртајем, брзина се израчунава програмски на основу карактеристика.
Предности употребе фреквентних претварача
Није узалуд да су људи почели активно да користе фреквентне претвараче у свим врстама предузећа, па чак и у свакодневном животу, јер су много економичнији од колектора и могу да раде у условима у којима се мотор четке брзо поквари. Уз све то, употреба фреквентног претварача омогућила је замену механичких варијатора са погонским системима, што је увелике поједноставило дизајн опреме. А с обзиром да ДПТ практично не захтева поправак током рада, употреба претварача је једноставно идеално решење.
Али треба имати на уму да постоје регулаторна ограничења код којих ће се променити и принцип управљања индукционим мотором:
- При регулисању брзине у опсегу од 16: 1 или мање, потребно је користити претварач који ради на волт - фреквенцијском одзиву.
- За регулацију у опсегу 50: 1 мора се користити векторско управљање без сензора.
- У великим дометима треба користити повратне информације помоћу сензора или пид контролера интегрисаног у претварач.
У сваком случају, када се планира употреба мотора у тешким радним условима, што се обично и дешава, боље је користити векторску контролу.
Регулација вектора и фреквенција
 Да би се изградио висококвалитетни систем самоходних пиштоља са асинхроним управљањем мотором, потребно је добро разумевање концепата, односно векторске регулације или регулације фреквенције.
Да би се изградио висококвалитетни систем самоходних пиштоља са асинхроним управљањем мотором, потребно је добро разумевање концепата, односно векторске регулације или регулације фреквенције.
Принцип фреквенције примењује се у системима у којима нема потребе за строгом контролом броја обртаја, а проток који мотор ствара без значајног оптерећења је важан. Али када је потребно обезбедити велики обртни момент и добру вучу од првог завоја, треба користити векторску контролу.
Векторске самоходне пушке такође се користе у системима за праћење са ниским протоком. На пример, у машинама за увлачење столова или носачима вретена. Овде је потребно не само превазићи инертност кревета, већ и обезбедити потребни напор приликом обраде дела.
Приликом дизајнирања цхастотника за трофазни електромотор властитим рукама потребно је узети у обзир врсту оптерећења јер ће о томе зависити и карактеристика управљања прекидачима за напајање како би се постигла потребна снага уз минималне губитке.
Техничка имплементација претварача
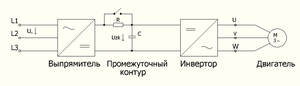
Тако долазимо до конструкције дијаграма контролног блока индукцијског мотора. И одмах бисте требали осигурати да готово сви произвођачи ове врсте претварача користе исти блок круга који можете користити за дизајнирање властитог претварача. А састоји се од следећих компоненти:
 Неконтролирани исправљач трофазног напона 380 В или једнофазни 220 В.
Неконтролирани исправљач трофазног напона 380 В или једнофазни 220 В.- ДЦ бус са уграђеним ЛЦ - филтером, који се састоји од низа кондензатора који осигуравају његово стабилно пуњење и елиминишу пукотине током пренапона у мрежи.
- Инвертор напона који претвара константни средњи напон у наизменични напон жељене фреквенције. Опремљен је ПВМ-ом за контролу квалитета.
- Асинхрони електромотор којим се управља.
Треба рећи да су произвођачи дуго корачали ка стварању идеалног ПВМ-а уз помоћ којег би се могла стабилно управљати мотором. И тек појавом ИГБТ модула постало је могуће. Стога, за израду сопственог претварача препоручује се коришћење кључева напона од најмање 1200 В, узимајући у обзир могуће мрешке и добру маргину струје. На тржишту је сасвим могуће пронаћи транзисторе и модуле до 100 или више А.
Поједностављени круг претварача блока изгледаће овако:
 Исправљач, његово повезивање се врши по принципу једнофазног или двофазног мостовског круга. Дизајниран је за претварање измјеничног напона у истосмјерни, погодан за даљњу претворбу фреквенције од 0 Хз до главне мреже. Средњи круг условно се састоји од два блока:
Исправљач, његово повезивање се врши по принципу једнофазног или двофазног мостовског круга. Дизајниран је за претварање измјеничног напона у истосмјерни, погодан за даљњу претворбу фреквенције од 0 Хз до главне мреже. Средњи круг условно се састоји од два блока:- Уређаји за глатко пуњење аутобуса, како не би оштетили струје за пренос струје приликом пуњења кондензатора. То се назива баластна отпорност.
- Блок кондензатора је филтер.
Израчунати напон средњег круга је √2 пута већи од У Н. Након постизања траженог константног нивоа напона на магистрали, отпорник премошћује контактни пар. Посљедњи блок у кругу је претварач. Ово је крајњи покретач излазних импулса, који се затим доводе у мотор, осигуравајући његово окретање у одређеној брзини.
Генерализована структура напајалног модула приказана је на следећој слици:
 За изградњу претварача користе се транзистори велике струје који раде у режиму чистог пребацивања. У том су процесу врло вруће, па се постављају на велике радијаторе са великом површином расејања топлоте.
За изградњу претварача користе се транзистори велике струје који раде у режиму чистог пребацивања. У том су процесу врло вруће, па се постављају на велике радијаторе са великом површином расејања топлоте.
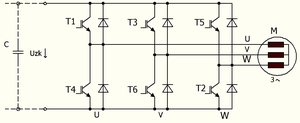
Да бисте дизајнирали управљачки круг претварача, морате јасно замислити недостатке тастера. Да бисте то учинили, обратите пажњу на слику испод:
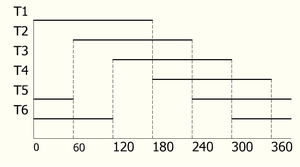
Приказује временске интервале за сваки од кључева инсталираних тим редоследом, као што је приказано на претходној слици. То јест, у фази У раде транзистори Т1 и Т4, у фази В - Т3 и Т6, и тако даље. За сваки од намотаја мотора гомила пара ИГБТ. Када конструишете претварач за моторе мале снаге са слабом струјом, можете користити једноставне биполарне транзисторе са ефектом поља.
Временски дијаграм показује да се у првом тренутку отварају транзистори Т1, Т5 и Т6. Надаље, транзистор Т1 и Т6 и даље су отворени, док се Т5 затвара, а Т2 отвара и тако даље. Овај дијаграм у потпуности понавља дијаграм напона у трофазној мрежи, али само импулси имају правоугаони облик и фреквенцију поставља регулатор.
Резултат је врста цикличног пребацивања транзистора, док се струја у фазама помера за 120 ° у односу на друге. А да бисте добили контролни напон, који се састоји од многих импулса, у облику синусоидног сигнала са минималним бројем хармоника, користите однос укључених и искључених транзистора.
Да би се минимизирали губици мотора, који се обично јављају током покушаја управљања смањењем напона преко намотаја мотора, прибегавају се повећању фреквенције.
Принцип регулације брзине
Да бисте променили брзину ротације вратила мотора, потребно је променити фреквенцију ф 1, али то треба обавити пажљиво. На крају крајева, потребно је задржати струју магнетизације непромењеном. Да би се одржала ова равнотежа, У1 мора бити пропорционалан ф 1. али ако се равнотежа прекине, струја магнетизације ће се или смањивати или повећавати. У складу с тим, поље ће ослабити или пренасићено. Да би се ово осигурало, у / ф карактеристика се бира линеарном све док се не постигне угаона фреквенција. Јавља се када напон на намотима порасте до максималне вредности.