
- Разлике и варијације степенастих мотора
- Дизајн и принцип рада
- Методе управљања фазама
- Методе управљања степеним моторима
- Режим микростепеног погона
 Степени мотор је електромеханички уређај који претвара електричне сигнале у дискретне угаоне помаке осовине. Употреба корачних мотора омогућава радним телима машина да праве строго одмерене покрете, учвршћујући свој положај на крају покрета.
Степени мотор је електромеханички уређај који претвара електричне сигнале у дискретне угаоне помаке осовине. Употреба корачних мотора омогућава радним телима машина да праве строго одмерене покрете, учвршћујући свој положај на крају покрета.
Користе се у ЦНЦ машинама, роботика, где су потребни дискретни покрети, фиксација положаја и мала брзина.
Разлике и варијације степенастих мотора
По принципу рада они су ближи истосмјерним моторима. Дизајн електромотора константно се побољшава како би се смањили трошкови рада у производњи, повећала ефикасност и повећао број обртаја. У поређењу са једносмерним мотором, немају четке, колектор и намотаје са мање окретаја.
Међу првим моторима створен је минијатурни мотор за сат који је добио име по француском инжењеру Мариусу Ловету. Статор је искључен на ивицама или у пределу ротора има мала стезања. Ротор пречника 1, 5 мм, магнетно заснован на кобалту. Једно навијање у једном реду снаге 1, 5 волти. Угао ротације је 90 степени.
Мотор лавете се такође користи у медицини за пумпање различитих течности, а често се користи и у мешалицама и мешалицама.
Недавно је у току развој пиезоелектричних мотора који користе пиезомагнетски ефекат и који користе феромагнетске материјале у конструкцији. Побољшани су линеарни мотори у којима се осовина не окреће, већ врши линеарне покрете. За прецизну механичку опрему руски произвођачи производе моторе са серијском ознаком:
 ДС.
ДС.- ДСхР.
- ДСхГ.
- ДСЛ.
- СХД.
- ДСЕ
Таква предузећа као што су НПО АТОМ, ЗЕТЕК, Електропривод, Степмотор, Вексон, НПО РИФ, Саратов ел. механички, ВНИИЕМ Цорпоратион, ЗАО Уралелецтромасх, АРЦ Енергосервице. Стране компаније: Мотор за пуњење, Аутоницс, Мотионкинг ИУХА мотор, Јлангсу, Пхитрон и други баве се производњом моторних погона ФЛ 203, ФЛ 28, ФЛ 57, 35 ХС, 57 ХС, 17 ХД. Распон произведених погона мотора је разнолик: по величини, снази, са уграђеним мењачем и управљачком плочом.
Дизајн и принцип рада
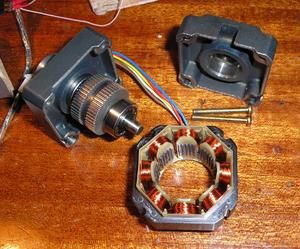
 Степер мотор се састоји од статора и ротирајућег ротора. Језгра статора израђена је у облику папира лима електричног челика (жигосана). То смањује вртложне струје и самим тим загревање. Статор је ободно подељен у 4.6, 8 уздужних жљебова. Примене и још много тога. На избочењима између жлебова су намотаји у облику завојница. Број прореза одговара броју моторичких полова. Што је више полова мање је угао ротације ротора, односно нагиб.
Степер мотор се састоји од статора и ротирајућег ротора. Језгра статора израђена је у облику папира лима електричног челика (жигосана). То смањује вртложне струје и самим тим загревање. Статор је ободно подељен у 4.6, 8 уздужних жљебова. Примене и још много тога. На избочењима између жлебова су намотаји у облику завојница. Број прореза одговара броју моторичких полова. Што је више полова мање је угао ротације ротора, односно нагиб.
Ротор се састоји од једног или два стална магнета, са крајевима, чије су металне плоче фиксиране зубима. У овом случају су плусеви С и Н сталног магнета подељени на н половица, што одговара броју зуба. Такође утиче на величину корака ротације. Према дизајну ШД, у зависности од дизајна ротора, производе се три врсте:
- реактиван;
- ротор са сталним магнетом;
- хибридни.
 Реактивно - ротор је направљен од феромагнетског материјала са уздужним уторима, половима. Ретко се користи, само за једноставне задатке. Углавном због чињенице да нема тренутак закључавања. Хибридни - ротор је направљен од две половине феромагнетног материјала, са уздужним уторима и сталним магнетом је смештен између њих. Жљебови половина један према другом помичу се малим углом како би се смањила висина тона. Најчешће се користе.
Реактивно - ротор је направљен од феромагнетског материјала са уздужним уторима, половима. Ретко се користи, само за једноставне задатке. Углавном због чињенице да нема тренутак закључавања. Хибридни - ротор је направљен од две половине феромагнетног материјала, са уздужним уторима и сталним магнетом је смештен између њих. Жљебови половина један према другом помичу се малим углом како би се смањила висина тона. Најчешће се користе.
Када се на намот статора примени импулсни напон, ствара се електромагнетно поље. Интеракција са најближим полом сталног магнета ствара обртни момент. Осовина мотора ротира за одређени угао. Угао ротације углавном зависи од броја полова ротора.
Такав мотор ће се звати степпер. Због малих димензија, ВД серије Ем 422 користи се у матричним штампачима.
Методе управљања фазама
Управљање углавном зависи од броја полова и конфигурације намотаја статора. СД се производе углавном са следећим намотима:
- Два намотаја са 4 игле.
- Два намота са 6 жица са просечним прикључком.
- Четири намотаја - 8 закључака.
 Можете контролисати две методе, користити униполарни напон - униполарни или биполарни - биполарни. Униполарни степпер мотор има 4 пола и 2 намотаја. У четверофазној фази, сваки намот је подељен на пола и налази се на супротним половима. Ротација се врши наизменичним наношењем напона на намоте. Са 6 водича или 5, такође са 2 намотаја, али са славином из средине. Обично су средњи водичи завојнице повезани заједно са негативном жицом, а позитивни се преко управљаних тастера доводе у намоте.
Можете контролисати две методе, користити униполарни напон - униполарни или биполарни - биполарни. Униполарни степпер мотор има 4 пола и 2 намотаја. У четверофазној фази, сваки намот је подељен на пола и налази се на супротним половима. Ротација се врши наизменичним наношењем напона на намоте. Са 6 водича или 5, такође са 2 намотаја, али са славином из средине. Обично су средњи водичи завојнице повезани заједно са негативном жицом, а позитивни се преко управљаних тастера доводе у намоте.
Биполарни мотори имају 4 намотаја, по 2 за сваку фазу. Управљање се дешава када се промени поларитет намотаја. Овом контролом је схема повезивања степенастог мотора компликована, али обртни момент се добија више. Главне карактеристике су напон напајања, потрошена фазна струја, корак, снага и величина прирубнице. Седишта су стандардизована и означена су као, на пример, Нема 23. То одговара растојању између отвора за уградњу од 57 мм.
Методе управљања степеним моторима
 Употреба моторних погона у ЦНЦ машинама конкурира само серво-погонима, на пример, у машинама за ерозију или штампачима, чак их и превазилазе у својим техничким могућностима, трошковима и једноставним схемама управљања. Управљање се може извршити на дигиталним микровезама, специјализованим - А3977, на програмираном ПИЦ16, преко тастера или СМСД 1.5 драјвера.
Употреба моторних погона у ЦНЦ машинама конкурира само серво-погонима, на пример, у машинама за ерозију или штампачима, чак их и превазилазе у својим техничким могућностима, трошковима и једноставним схемама управљања. Управљање се може извршити на дигиталним микровезама, специјализованим - А3977, на програмираном ПИЦ16, преко тастера или СМСД 1.5 драјвера.
Већину управљачких програма управља рачунар преко РС-232, УСБ и ЛПТ портова. Они генерирају управљачке сигнале: корак, правац, резолуција и пружају ½ корак подјеле до 1/32 и раде с програмима: МАЦХ3, КЦам, ДескЦНЦ, Турбоцнц и други. Прикључите мотор на возач каблом како је описано. Проучавајући рад програма, није тешко започети са радом. За укључивање се користи напон од 5 до 48 волти. Изузетак су мотори од 220/110 волти .
Режим микростепеног погона
Главно време рада корачног мотора је у режиму корак по корак или пола корака, а за покретање и заустављање препоручљиво је да се користи микро корак корак за прецизно фиксирање. Корак-корак корак се одређује дизајном и контролом пулса. Током микростезања на намоте се примењују синусоидни напони са жељеним помаком фазе.
Ротор је фиксиран на одређени однос фаза струја у намотима. Израчунавање тачке равнотеже формулом к = С * пи / 2 * арцтан а / б где је:
- а је тренутак створен првом фазом и б је друга фаза;
- к је равнотежна тачка ротора или микростепе у радијанима;
- С је угао корака.
 Такође је потребно узети у обзир максималну фреквенцију контролног сигнала на којој нема губитка или додавања додатног корака током рада. Главни је индикатор пролазног начина корачног мотора, а у карактеристикама је означен као учесталост реакције мотора.
Такође је потребно узети у обзир максималну фреквенцију контролног сигнала на којој нема губитка или додавања додатног корака током рада. Главни је индикатор пролазног начина корачног мотора, а у карактеристикама је означен као учесталост реакције мотора.
Током рада, потребно је надгледати чистоћу око погона и спречити улазак металних чипова, могуће је отказивање погонског мотора. Пронађите начин да заштитите погон. Поправак је сличан поправци мотора комутатора, захтева тачност.
Након растављања узмите и пухајте статор компримованим ваздухом и обришите ротор крпом. Проверите да ли има лежаја.